Drone and UAV Technology Reviews, Articles, News, Build Logs
When flying with my quadcopter and GoPro, I set the camera to automatically take photos at certain intervals. This is great when trying to capture photos and flying line of sight, as the camera is just shooting all the time. I ran into a problem with not being able to do this with my big hexacopter and Sony NEX5-T camera. There is no auto shoot or time lapse mode for the NEX camera.
I did some research online and found the Flytron sLED v2 Sony RC Shutter. This is a small infrared device with servo plugs which plug directly into the aircraft’s radio receiver. The sLED v2 allows the operator to remotely trigger photo taking, or turn on/off video recording. Fantastic. Both can be done in-flight.
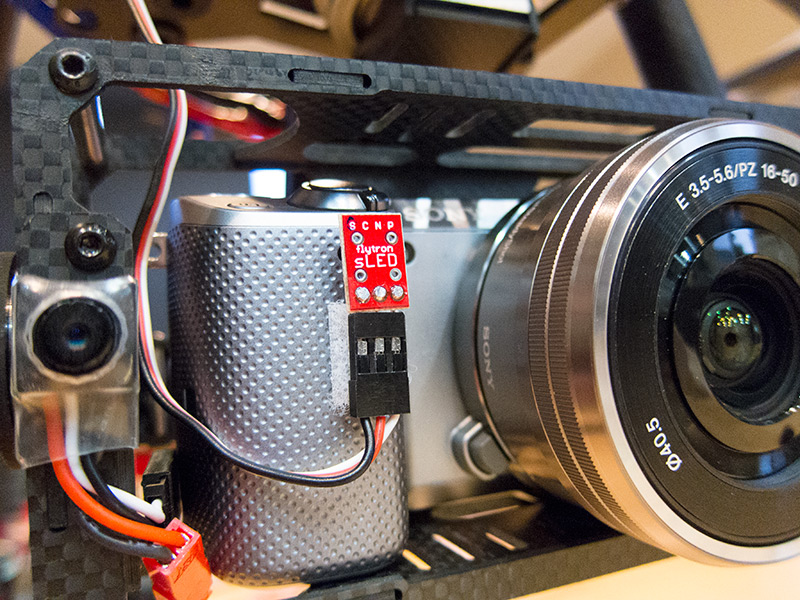
A small piece of velcro attaches the sLED to the camera
Setup
A free channel on the transmitter and receiver is needed to set up the sLED. The channel should be assigned to a three position switch. The middle position is no action, while on my setup flipping the switch up triggers a photo shot and flipping the switch to the bottom position turns on video recording.
The sLED unit needs to be able to get its infrared signal to the infrared sensor on the NEX camera. I wanted to be able to put the sLED on and take it off as needed, so a simple bit of velcro on the camera and the sLED made that easy.
I learned that leaving the switch on the transmitter in the up or down position, sends a constant signal. So leaving the switch up on my setup results in constant photo taking. The constant photo taking is not as fast as I would like, at about 8-10 seconds per shot. Leaving the switch in the down position results in a start/stop video of about one second, every 8-10 seconds. For video, leaving the switch down is not useful.
One experiment I have yet to try is a custom setup on my transmitter which would simulate flipping the photo switch every X seconds. More to come on that.
Conclusion
The sLED v2 Sony RC Shutter unit was perhaps the most useful $15 I’ve spent to date on my large multirotor.
It is nice to be able to shoot video and take photos via the sLED. Part of the flight can be for video and part for stills without having to land the aircraft and reconfigure the camera.
I’ve been very happy with the latest results of my flight tests with regards to the smoothness of the video and the gimbal performance. The only current issue to resolve is that the arms and propellers are sometimes in the video and photos. The less aggressively the flight, the less the issue occurs.
So the current need is to lower the gimbal/camera so that the unwanted items are not in the display. One caveat to that is that the landing gear may become visible. Another possible issue is that the longer the throw between the camera and the body of the bird, the bigger effect it will have with the overall balance as well as vibrations.
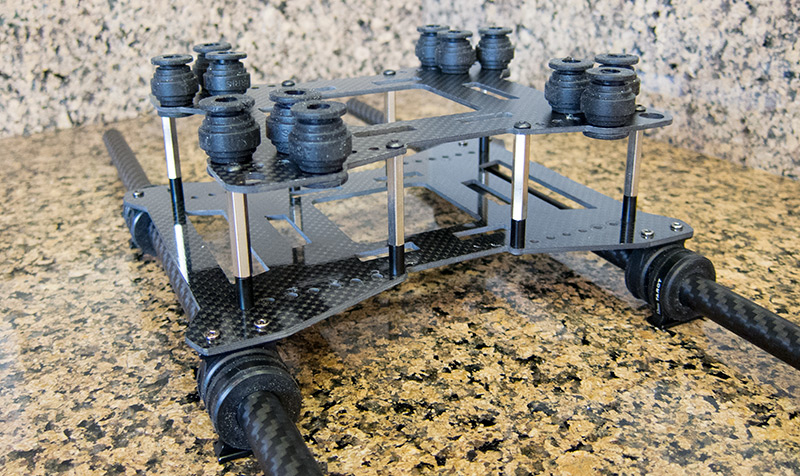
The first test today will be this setup (above and below pictures), adding about 1.25 inches of extension.
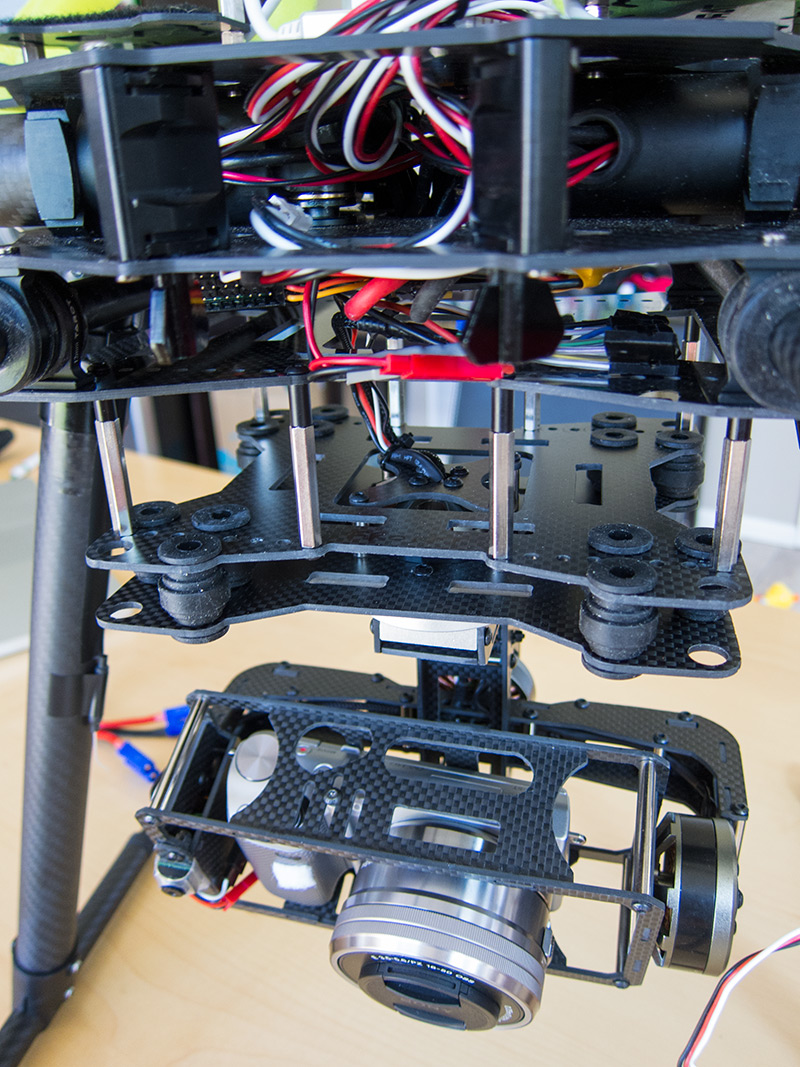
I’ll check for props/arms/landing gear in the video as well as video clarity. I’ll also check the vibration in the SuperX flight controller logs. Also should note how it flies, as the center of gravity of the copter will be affected.
A report will follow.
Got in the Flytron Sony NEX shutter control cable a few days ago. So easy to setup. I now can flick a switch on my transmitter to capture a still image, OR I can flick the switch the other way to start video rolling. Here are a couple of captures with default settings, including auto focus, which may not be the best way of doing it.
