Drone and UAV Technology Reviews, Articles, News, Build Logs
Drone LED Lights – Green Front, Red Back
I received a nice email with some comments from Pat at Colour Sky Films. Pat was very kind, and has been following along with my build logs and flights of my big ship, a 960mm hexacopter drone built on a Tarot T960 frame. Paul asked some questions as he is building a similar bird. I thought it would be cool to post those in Q&A form here, and Paul agreed. Below is Paul’s first question regarding the LED lights on my bird.
What type of LED lights are those I see on your Tarot? I get fooled all the time with the true direction of my craft at a distance, and even fairly close! And also, how did you fix them to the booms?
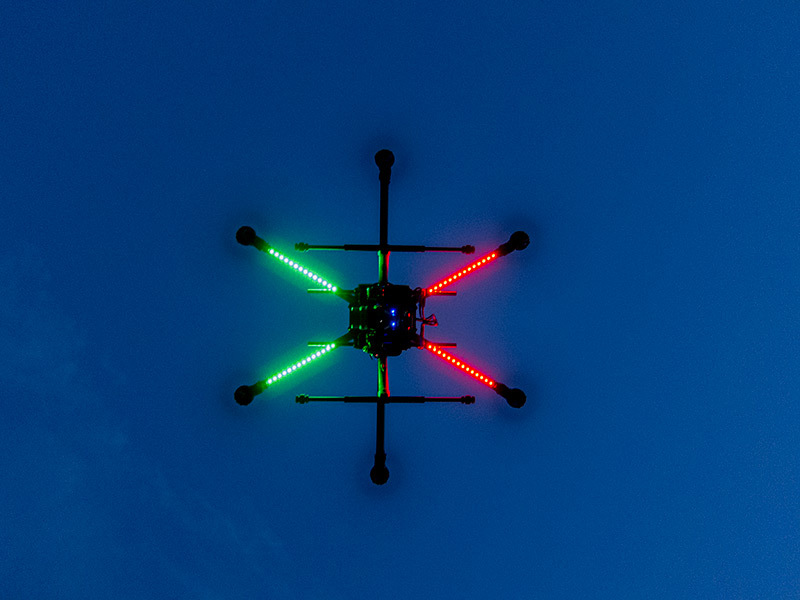
I also had the same orientation problems. When looking up at the black air ship it sometimes suddenly appeared to be banking 45 or 90 degrees. It was an optical illusion. I decided LED’s would help with orientation. I found LED light strips at a local hobby shop just down the street from my house. The strips come in different colors and pieces are sold by the foot. One side is sticky, just like tape. I taped them to the booms, but their stickiness isn’t great, so I back that up with some black electrical tape.
Now when the bird is above me I can tell front and back, as I put green on the front two booms and red on the back two.
When I have some time I will probably change the configuration of the LED’s though. With them mounted on the underside only, I can’t see the LED’s when the bird is at a lower level and a little farther away. I may wrap the strips around the ends of the booms so the lights can be seen from just about any angle.
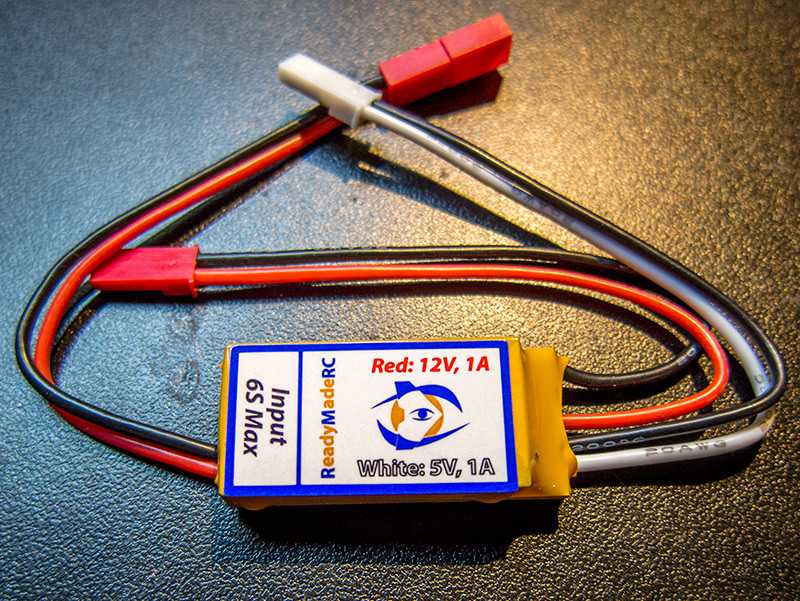
5V/12V Dual Step Down Regulator (RMRC-5-12-STEP)
The LED’s run on 12 volts, so I had to get a BEC to step down the 6S battery voltage. I got the BEC from Ready Made RC and it has a 5 volt and 12 volt output. I run the LED lights with the 12 volt and my FPV camera and transmitter with the 5 volt output.
While I was at it, I picked up a switch which I could assign to a channel on my transmitter. This allows me to turn the boom LED lights on and off. If I don’t need the lights, there’s no need to drain the battery. I also may want to fly in a more “stealth” mode sometimes.
I also installed some flashing navigation strobes at the end of the front two and rear two booms, to help with orientation as well as making the bird visible to others. I don’t want someone else crashing into the thing. Below you can see the unit as it is attached with double sided tape at the end of the boom. Since they run on 5 volts, and since my ESC’s have a 5 volt BEC which is lifted and not needed for my flight controller, I’m just taking the power from the ESC’s.
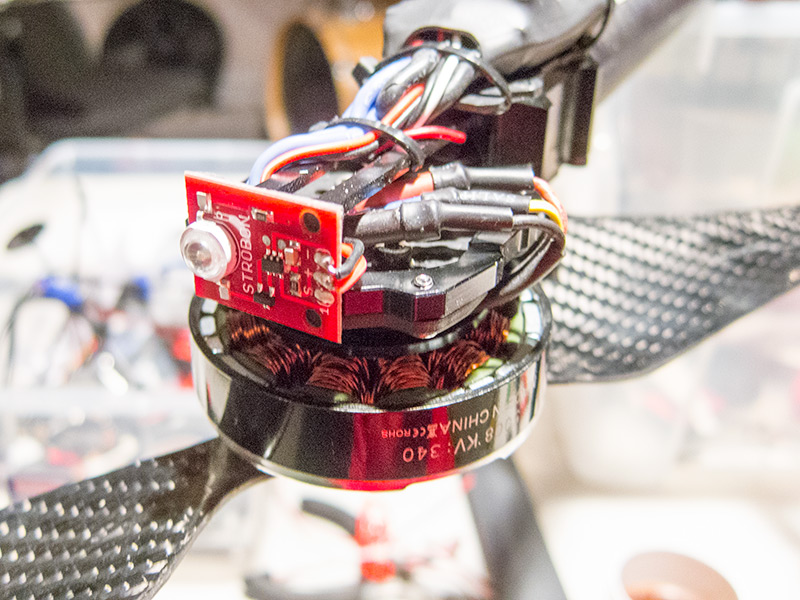
Strobon Flashing LEDs from Flytron.com
The navigation strobes are made by Strobon and I got them from Flytron.com.
 After hours of trying to reduce vibrations in the Alien H4 680mm quadcopter drone, I’ve decided to order two new motors. I’ll be replacing the two motors on the rear of the craft. Despite all the attempts to balance the motors, especially motor #3 (left rear), I’m taking a guess that one or both of the motors are damaged from the crash, or even perhaps the first flip. The vibration is practically visible on motor #3. I can see the landing gear visibly moving. Touching or even getting close to touching arm #3 “tickles.” It is obnoxious and no wonder I can’t capture any decent video.
After hours of trying to reduce vibrations in the Alien H4 680mm quadcopter drone, I’ve decided to order two new motors. I’ll be replacing the two motors on the rear of the craft. Despite all the attempts to balance the motors, especially motor #3 (left rear), I’m taking a guess that one or both of the motors are damaged from the crash, or even perhaps the first flip. The vibration is practically visible on motor #3. I can see the landing gear visibly moving. Touching or even getting close to touching arm #3 “tickles.” It is obnoxious and no wonder I can’t capture any decent video.
Two new motors are on the way on the slow boat from China. I will balance them before installation, which I should have done before. Once the new motors are installed I’ll tear apart the old ones and check to see if the bearings or the prop posts are broken or bent. That would cause the vibration problems. If I can fax them, then I’ll have a couple of extra motors.
Here’s a fun glam shot of my recently rebuilt, post-crash Alien H4 680mm quadcopter drone.

Alien 680 Quadcopter
The post-crash rebuilt is 98% done. I’m back to tweaking the GoPro and gimbal setup. The remaining 2% is confirming that the landing gear actually works, since it failed once in a recent flight. Also some of the tube mounts are not the exact right one so waiting for replacements on those on the slow boat from China.