Drone and UAV Technology Reviews, Articles, News, Build Logs
This is one of the better, and more dangerous drone saves I’ve seen in a while. The waves and rocks where this guy ends up are pretty risky. But when you have that much dough put into a UAV, you don’t think about that.
Reader Pat’s question and answer continues. The two previous questions were related to drone lighting and the electric retractable landing gear.
How do you calibrate your motors, or did you mean that you’re throttle calibrating your ESCs?
I must have written somewhere that I had “calibrated the motors” on my large 960mm hexacopter. Pat’s terminology is better. I mostly likely was referring to throttle calibration of the ESCs. The process of throttle calibrating my ESCs was a pain. As it turned out there was a funky issue between my particular ESC model (Hobby-Wing Pro 40A) and my transmitter, a Taranis XD9.

Tarot 5008/340kv Motor
Typically a throttle calibration would be something like this. Power up the ESC with the throttle at maximum. After the ESC beeps, reduce throttle to minimum. It should only take a few seconds. But the above mentioned issue caused many of my ESCs to randomly not arm. It would seem that the distance of the throw was not enough, or that the throttle stick wasn’t going all the way down to -100. I fixed the throttle stick later but that’s not how I resolved the calibration issue.
After much reading I found that if I set my throttle distances from -89 to +100 and then did the calibration it worked. I would then set the throttle back to -100 to +100 after they were all calibrated. Then all motors would arm.
Regarding the Tarnanis not going all the way down to -100, the throttle stick would go down but would not stay at -100. It would stay somewhere around -95. That would mean arming problems as well, plus I would get the Taranis “throttle warning” and would have to move the sticks to be able to do anything. I had to take apart the Taranis and tweak the throttle screws until it went all the way down. Then of course my center point calibration with my flight controller went wonky. So I ended up doing all stick related calibrations for the Taranis and Taranis/SuperX controller over again.
Continuing on with my reader question and answer session today. The previous question from Pat was regarding drone lighting. Today’s question is about my electric retractable landing gear for my big 960 hexacopter.
How do you like your new Arris X-3 landing gear. I’m about to pull the trigger on a set, but would love to know how they are treating you.
The Arris Lander-X3 is made for larger multirotor copters, hexacopters and octocopters. I really like how wide the stance is and how long the feet are. The width and length gives the copter a very stable platform for takeoff and landing. It is much more stable than the stock landing gear this Tarot T960 came with.
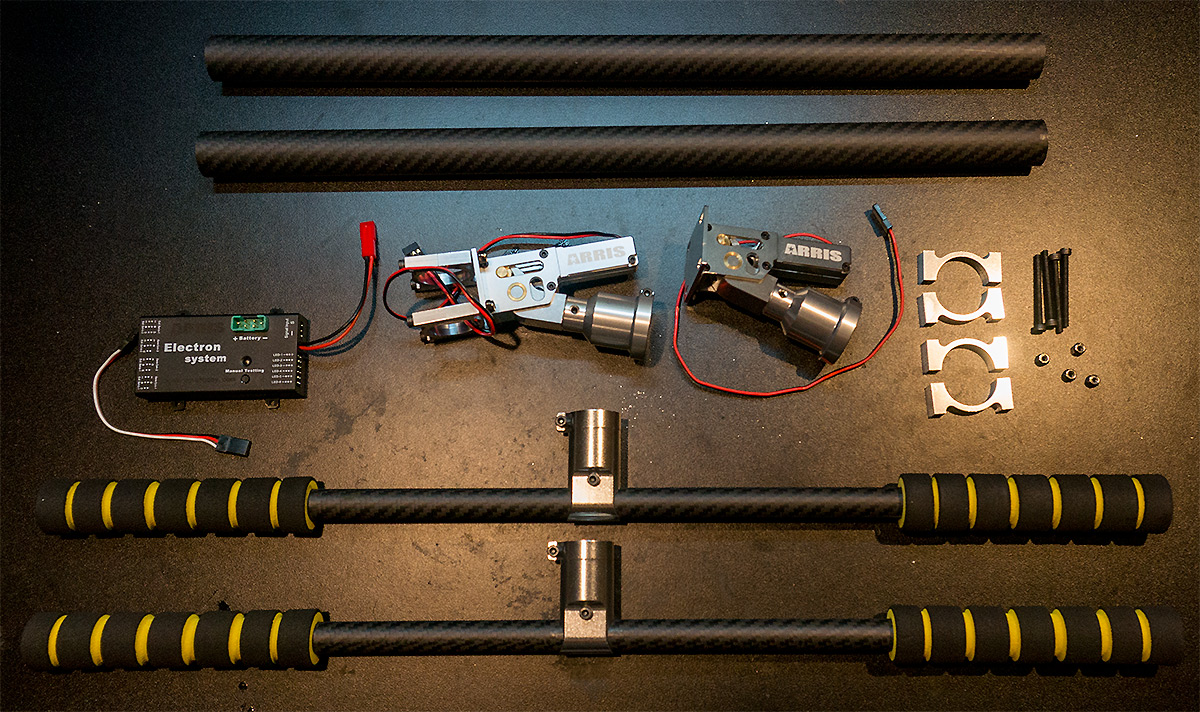
Arris Lander-X3 box contents
Setup is relatively easy. The gear can install to the frame of the copter or to two booms. Because I didn’t want to take apart my frame I went the boom route. Plus that makes the width a little wider. There’s a control box which powers the gear and has a button on it to manually engage the gear. The control box receives a signal from the copter’s receiver to put the gear up or down.
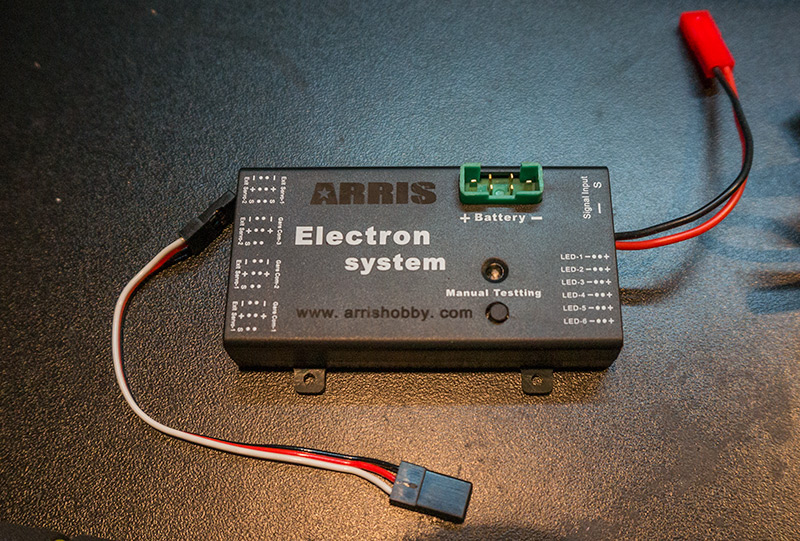
Arris Lander-X3 Control Box
The control box also has outputs for LED lights, but I have not used those as of this point.
Below is a video demonstration of the gear in action.
Issue
I have a small problem which I believe is my own fault. Due to a wiring short during some maintenance I think I may have fried something in the control box. I heard a pop sound and not sure where it came from. The gear now goes up fine during flight but takes several attempts to come down. The issue only happens during flight and not in the shop. Must be slightly related to voltage. I have a new control box on the way ($20) and will replace and report back if that solved the issue.
The quality of the parts seems to be very good. I’m hoping the box issue will be resolved when the slow boat from China arrives.