Drone and UAV Technology Reviews, Articles, News, Build Logs
After a recent road trip which I brought my Phantom and my hexacopter, I found that the Arris CM3000 3-axis camera gimbal on the Phantom became stuck. The pitch motor would only move about 1/16 of an inch. Something was blocking it. I didn’t want to give it too much force for fear of breaking it.
I found a replacement for the motor online for about $18. But before I ordered one from China and had to wait 17 million weeks for it to arrive, I thought I’d tear apart the broken brushless motor and see if I could fix it.
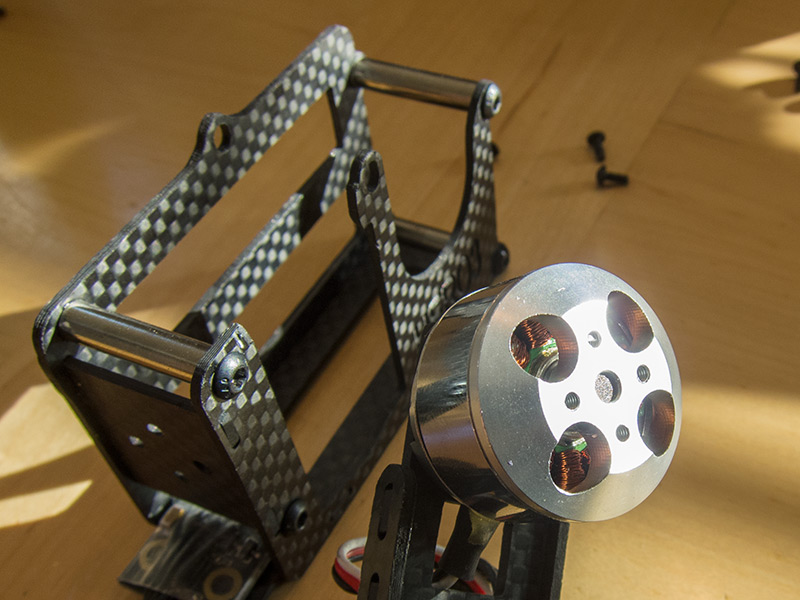
I’ve never torn apart a brushless motor before. It was not hard. I popped the clip on the drive shaft and unscrewed the shaft screw. Then the outer cover came off with a little force. It did not want to come out because of how strong the magnets were.

The problem was visibly obvious as soon as I had the cover off. A couple of the magnets had broken and a piece of them came off, lodging between two other magnets (above). I’m guessing the magnets were cracked during a Phantom crash, and eventually the piece broke loose. You can see the loose chunk below:

I cleaned out the debris, put it back together and it appears to be working again. I just hand tested it though. A real flight test is up next.
I’ve been very happy with the latest results of my flight tests with regards to the smoothness of the video and the gimbal performance. The only current issue to resolve is that the arms and propellers are sometimes in the video and photos. The less aggressively the flight, the less the issue occurs.
So the current need is to lower the gimbal/camera so that the unwanted items are not in the display. One caveat to that is that the landing gear may become visible. Another possible issue is that the longer the throw between the camera and the body of the bird, the bigger effect it will have with the overall balance as well as vibrations.
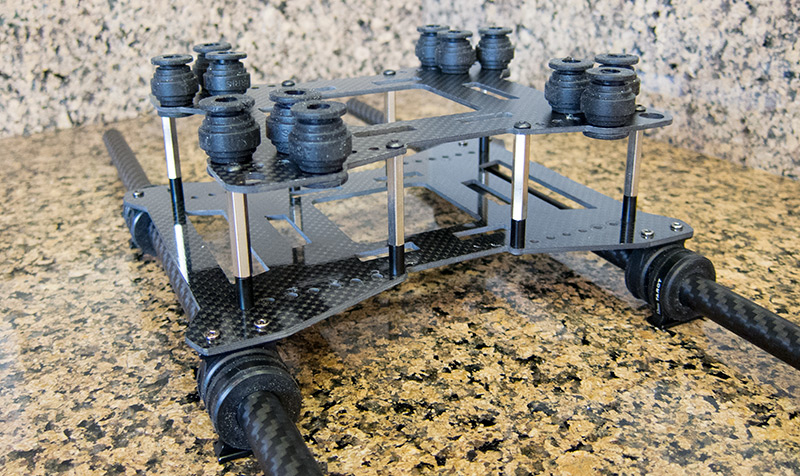
The first test today will be this setup (above and below pictures), adding about 1.25 inches of extension.
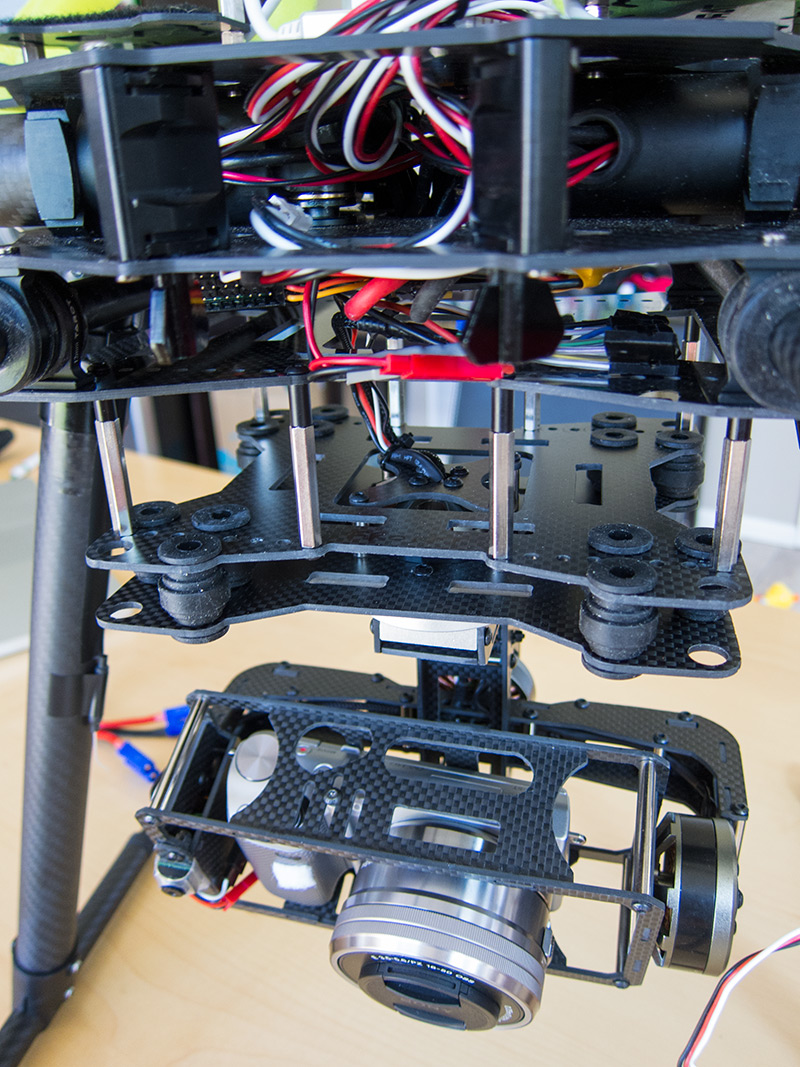
I’ll check for props/arms/landing gear in the video as well as video clarity. I’ll also check the vibration in the SuperX flight controller logs. Also should note how it flies, as the center of gravity of the copter will be affected.
A report will follow.
Got in the Flytron Sony NEX shutter control cable a few days ago. So easy to setup. I now can flick a switch on my transmitter to capture a still image, OR I can flick the switch the other way to start video rolling. Here are a couple of captures with default settings, including auto focus, which may not be the best way of doing it.
