Drone and UAV Technology Reviews, Articles, News, Build Logs
I’m thrilled to post that I finally seem to have a working gimbal for my DJI Phantom quadcopter.
 I ordered my first one, which turned out to be defective, in October 2013. It is now January 9th, 2014!
I ordered my first one, which turned out to be defective, in October 2013. It is now January 9th, 2014!
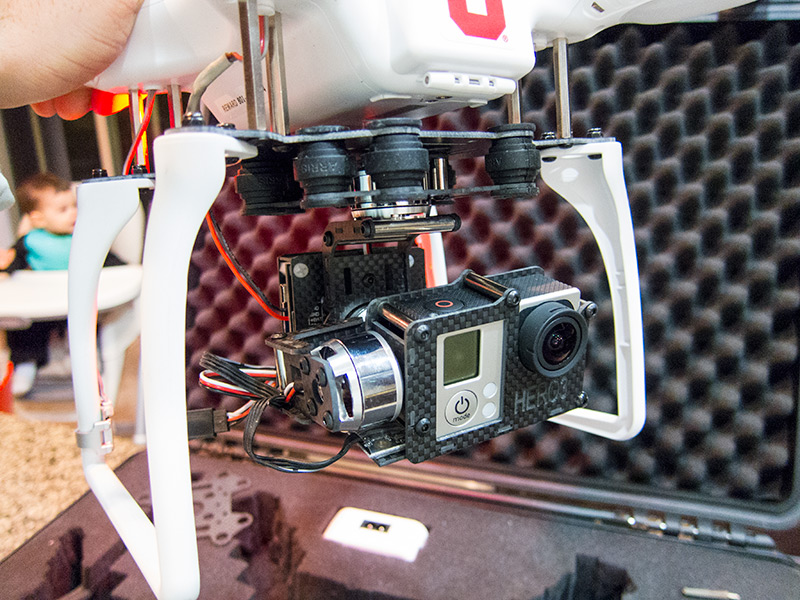
This gimbal has three axes, as opposed to two. The third axis can be set to keep the camera pointing a certain direction unless the copter rotates more than x degrees. VERY cool.
It was suggested that with the unit I install a setup which widens and extends the landing gear. This makes the unit more stable in takeoff and landing, and also allows the gimbal room to rotate.
 I’ll be taking some test video flights this weekend. Hope to show some nice, smooth video. I do know that the extra weight and power draw will reduce flight times and possible some of the handling capabilities of the copter. But really, if I’ve got the video/photo gear attached, I’m not looking to do any crazy stuff.
I’ll be taking some test video flights this weekend. Hope to show some nice, smooth video. I do know that the extra weight and power draw will reduce flight times and possible some of the handling capabilities of the copter. But really, if I’ve got the video/photo gear attached, I’m not looking to do any crazy stuff.
During Christmas vacation I finally was able to dedicate the proper amount of time to getting my new Arris CM2000 gimbal working with my DJI Phantom quadcopter. I was stoked to get it running to do some flyovers of some New Year’s Eve celebrations.
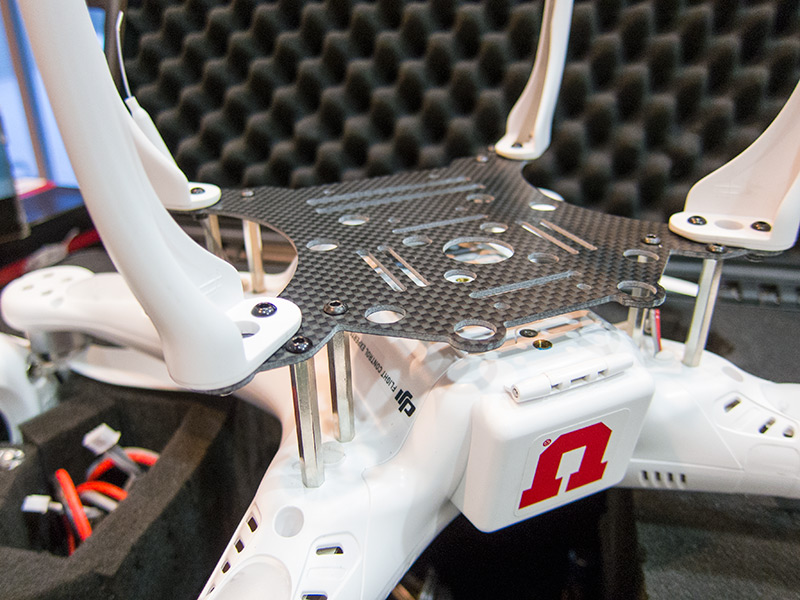
The first step is to get power to the gimbal. There is an auxiliary power cable DJI puts in the Phantom for this exact reason. It is located in the plug near one of the landing gear. Unfortunately in trying to get the wire out, I shoved it into the unit. That meant taking the whole top cover off. So while I had it open it was cool to take a picture:

I had to stop by a local hobby shop to get a JST connector which I soldered to the end of the aux power wire. That allows easy plugging and unplugging of the gimbal’s power.
That is the extent of the “good” part of this story. The gimbal was supposed to be RTF (ready to fly) out of the box. It was not. The unit would not move and there was a quickly flashing green light on the motherboard. This indicates a problem.
The next two days were hell. I needed to connect the gimbal’s motherboard to my computer to check it and perhaps tweak the gimbal settings. Being a Mac user made it difficult, as these types of things are usually windows based. I did get communication established, but there were errors. So I booted my Mac in Windows mode. After a lot of trial and error I finally got the proper drivers loaded and was able to talk to the board. My work hit the wall at that point as I got a “sensor not connected” error:
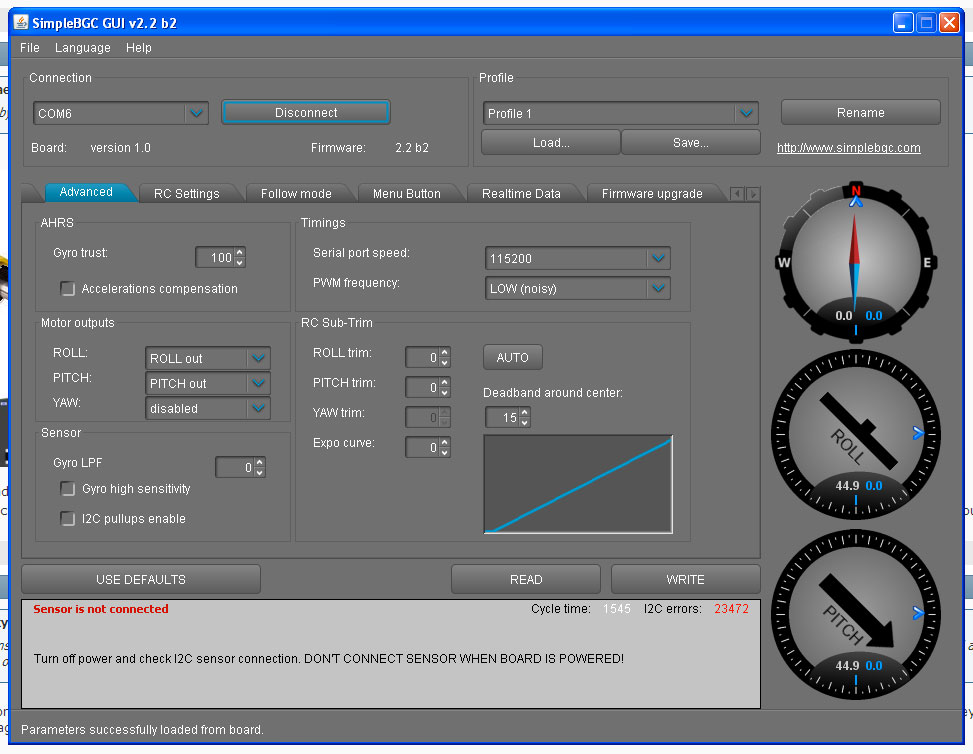
I’m suspecting it is the sensor below the camera. There’s a small cable connecting it to the board. I looked at all the connections with a magnifying glass and all looked good. I have yet to get a multimeter to check. In the mean time I’ve contacted the company I purchased the unit from on Amazon, looking for a replacement or refund.
I ordered this unit at the end of October 2013. It took weeks to come from China. It is now January 2, 2014 and I still don’t have a working gimbal.
I ordered a different unit with three axes, as opposed to two. If I get a replacement for this one, it will be a backup or I’ll sell it. Otherwise just hoping for a refund.
Three months ago I didn’t know what a gimbal was. Three months ago I wouldn’t have any clue as to why I’d need “quadcopter landing gear extensions.”
Today both of those items are installed…

The gimbal, a device which levels the camera, extended beyond the standard landing gear on my DJI Phantom. I found some extra feet made on a 3D printer from a Canadian guy on eBay and they arrived, albeit late, today.
The next step is to get power to the gimbal unit.