Drone and UAV Technology Reviews, Articles, News, Build Logs
I took the hexacopter up for a flight last evening. I was flying a two battery setup with the intention of getting more flying practice under my belt, testing out how long the flight time is, and trying my hand at ATTI mode.
The flight was great, and I’m guessing between 15-20 minutes. I have yet to look at the data from the flight controller (see cable issues below).
Attitude Mode
I tried my hand at ATTI mode. This is a different flying mode than what I have been testing, GPS mode. The copter is a little more quick on the handling and more of a manual control is used. It is a little tougher to fly, but for photos/video it can be better since the GPS isn’t trying to compensate for positioning all the time.

Flying in ATTI mode I learned that the bird can go a LOT faster.

The flight went well and by the end half the neighborhood was standing by me watching it, asking all sorts of questions. In those situations I have to stay focused on the bird for obvious reasons.
Following a smooth landing the neighbor kids tried to go up and touch the bird and I had to stop them, as I’d not disconnected the batteries yet. All I need is a massive lawnmower with carbon blades chopping the neighbor kids into little pieces if somehow the blades arm… No problems.
Lucky
Upon pulling the battery out, I noticed a major problem. The power lead for the battery connector came off. Had this happened in flight it would have been 100% failure of everything and the thing would have dropped like a rock, likely exploding into 1000 pieces.
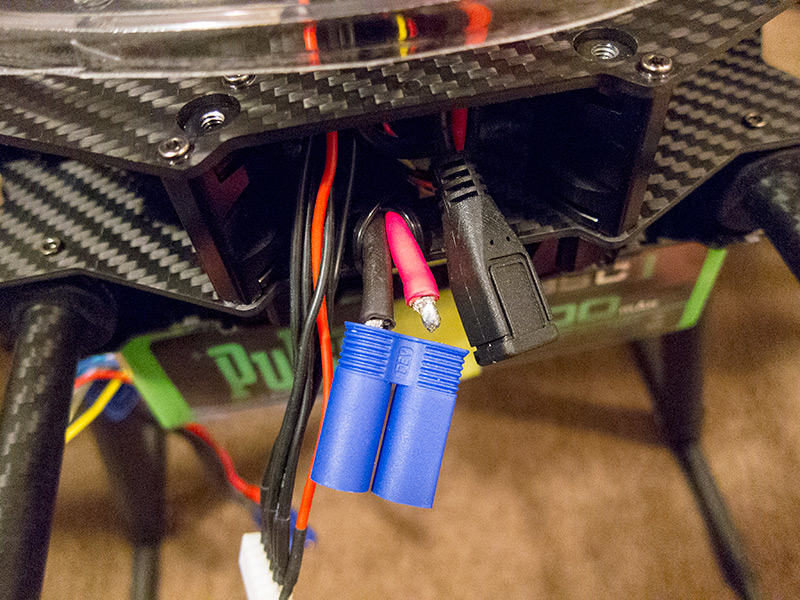
This is not good. MUST do a better job with this crucial part of the setup.
The wear and tear of removing the battery combined with too little slack put undue stress on the spot where the cable and connector meet. I need to redo that set up and make it a much more sturdy and durable solution.
RSSI Warnings
During the flight I noticed my transmitter speaking to me, “RSSI warning” and “RSSI critical.” RSSI is the receiver signal strength. At a couple of spots in the flight, the transmitter signal was low. I’ve ordered some longer antennae just in case that was the issue. It could have also been interference from nearby wifi networks or other electronics.
Battery Voltages
LiPo batteries like the ones which power this bird are expensive. They are special batteries which output at a high level for the whole time they are being tapped, unlike a regular battery which weakens. Due to the physics of these batteries, they must retain a certain amount of voltage all the time. I have telemetry which transmits these voltages to my remote unit.
I’m told by the battery manufacturer Pulse, that I should not fly them past or under 3.65 volts per cell (these have six cells), and to be even safer land the craft at 3.8.
Last night I logged the 3rd “real” flight of the megahexacopter.
The 2nd flight was a couple of days ago at the local park. There was a bit of wind and I was quite nervous. This bird has quite a bit of mass to it and when it gets going a direction, it takes a bit to change that direction. So when you are heading for a bad thing like a tree or telephone pole, a little panic starts to happen. More flying practice will help increase the comfort level.
Last night’s 3rd overall flight was a bit of a twist. This time I ran two 5000mah batteries to see what my flight time would be. I’m still unsure of the math involved and what is safe as far as battery voltage goes, so the total running time is still “up in the air” so to speak. I landed in what I interpreted to be a very conservative and safe battery voltage. The total flight time with the two batteries was 14 minutes. If the batteries can run down a little lower than 3.75 volts, the time would be longer. As expensive as these batteries are, I don’t want to take any chances ruining them.
I was happy to observe that the extra weight of another big battery had no noticeable effect on the performance of the bird. Takeoff was effortless and the flight of the bird seemed responsive and smooth. And I still have yet to mess with the gains, a property which controls the responsiveness of the motors. Gains have a big bearing on the performance and how it handles wind.
Many rigs like mine run two batteries. After running this rig with two, I’m looking at going with one huge 10,000mah+ battery rather than two 5000’s. The reason is that I have a voltage monitor on the bird which sends telemetry back to my remote. That telemetry shows my total battery voltage as well as the volts for each individual cell (total of six). One must keep an eye on the per-cell voltage to avoid running them too low and ruining the battery.
The reason I will move to one big battery is that voltage monitoring setup. In order for me to know the voltage of both batteries, I’d have to get a second voltage monitor and have a total of 12 voltages to look at while flying. I’d much rather have one battery, one voltage monitor, and one set of wires to hook up. The current setup means a Y wire and more weight etc…
In short, one battery is much easier to deal with and will have slightly less weight and thus more flight time (hopefully).
The current plan is more practice flying and getting the gains setup properly. This setup does have a manual capability, where a knob on my remote adjusts the gains while the bird is flying. This is a great feature as one can make the adjustment in the field, rather than having to hook the bird up to a computer and adjust them, then take it flying to see how the adjustments work.
It is also now the fun time to start working on the gimbal and camera setup and start with some basic media capturing. I hope to have somewhat of a running camera setup in the next 1-2 weeks. But these things all seem to take longer than expected.
Yesterday on the way to pick up the pizza from the pizza place I did my first official “real” test flight of the megahexacopter. I went to a big grass field at a park down the street.
This hexacopter takes off and lands so easy. It is light years easier than takeoff and landing of my little Phantom quadcopter. The power of the motors is impressive and with the SuperX flight controller, the stability is amazing. The sound is manly. The machine does not have to work hard at all. Most importantly the movement and hover is smoooooth.

All the stability and everything I describe above is all with the stock gains/settings.
One drawback is that the system has no battery warning. I have a device which will monitor the battery levels and send the voltages back to my transmitter. I can set the transmitter to play a sound when the voltages start to get low. That’s next. Then I can analyze what my current flight time is.

Soon I’ll be messing with a big 3-axis gimbal and putting my little Canon S95 on there for fun. I need a new camera for this rig, but I’m still shopping on that.