Drone and UAV Technology Reviews, Articles, News, Build Logs
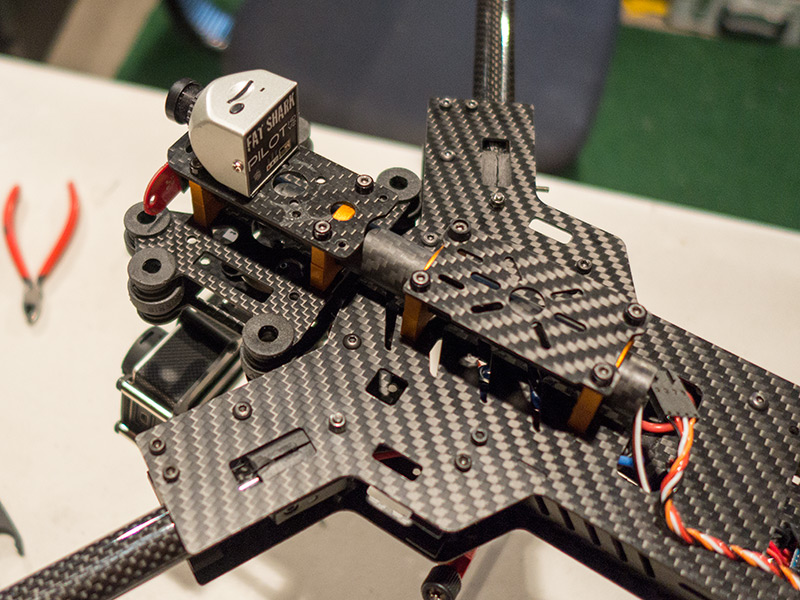
My schedule has not been conducive to building new copters lately. I’ve been in the midst of mega rebuild of the 680 Alien quadcopter and associated gimbal setup. The second I got that working to my satisfaction is the second I moved my build energy to the Arris X-Speed 250 quadcopter racer.
It’s a good thing I put off this build, because during the time I took a break from it, they created a build manual! Needless to say, my guesses were completely wrong, so I had to basically rip it all apart and rebuild, and rewire.
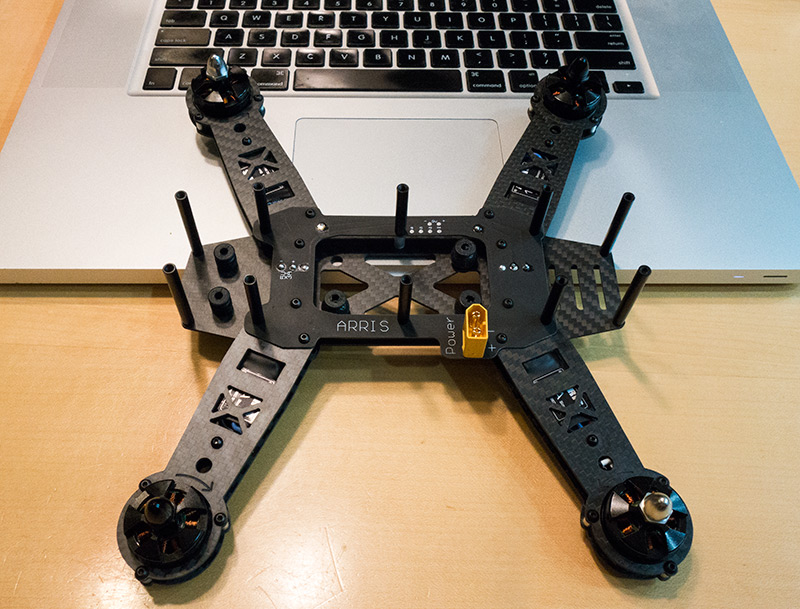
The current build state is 3/4 of the frame is assembled. Also, the motors and ESC’s are installed and soldered to the included power/signal distribution board.
Stay tuned for further progress, and future crash videos.
Strange behavior in my Alien last night. Finally tried a test flight of the new setup with my gimbal mount forward and battery back a tiny bit. This is to attempt to get the props out of the video/photo frame.
On take off my bird would not yaw clockwise, only counter. And it would not hold position. Luckily I was able to land it without doing any damage as I had minimal control. I recalibrated the GPS/compass but still issues. A look at my motor outputs (photo below) shows the clockwise motors are at a much lower output than the other two.
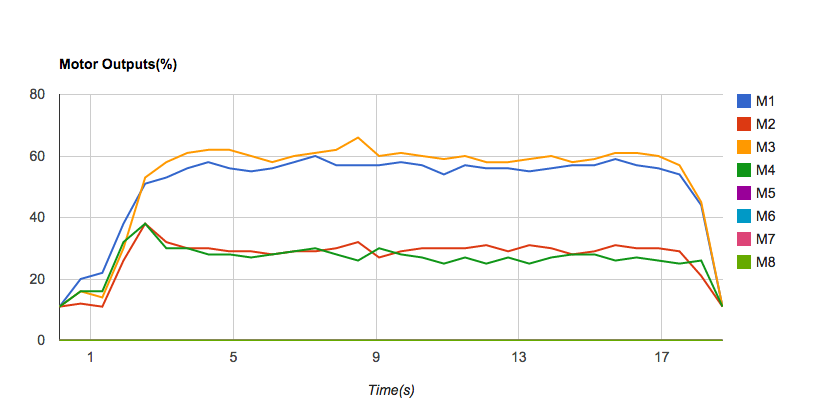
Because of this event I decided to upgrade the firmware on the MiniX flight controller and will probably go through all the stick calibrations again. More testing soon.