Drone and UAV Technology Reviews, Articles, News, Build Logs
It was bound to happen, or was it? I had a small crash yesterday with my big hexacopter. I was attempting to take off and the bird flipped over onto its top. Normally a flip like that indicates propellers on wrong, or motors wired wrong but I haven’t changed anything in the over 100 previous flights.
The bird sustained some minor damage:
I’m going to do a deep inspection and check all screws, levels, mounts, and such before going airborne again.
Causes for RC Multi-rotor Copter Flip
The copter flipped over from left to right, meaning the left side launched faster than the right. I have noticed a couple of takeoffs where the right side seemed to lag a big, requiring me to give it more thrust. Perhaps this time around I was too aggressive with the takeoff and the flight controller was not able to respond quickly enough.
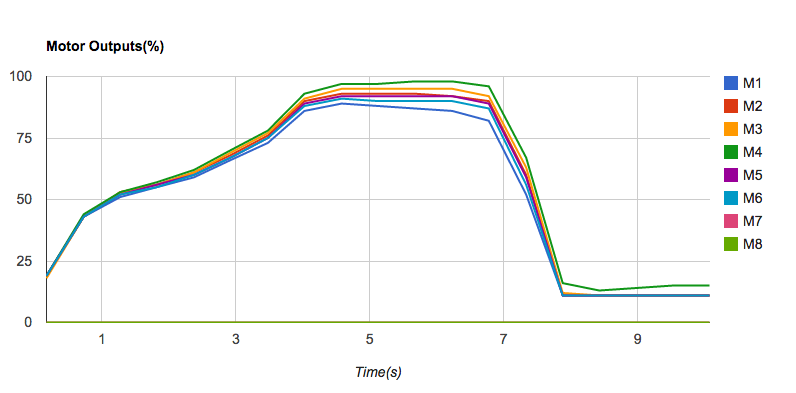
I theorize it is possible that my motors need recalibration. I think perhaps the motors on the left side are calibrated to a higher thrust rate than the right side and this image may support that a bit. The image below is a props-off test of zero to full throttle over about 10 seconds.
Other Theories
One suggested theory is solar flares. Yes that sounds crazy, but solar flares have been happening quite a bit lately and they can cause GPS devices to malfunction or produce bad readings.
Another suggestion is that the GPS was having other issues and not locked on the proper location. If this is the case, the copter may try to move to the position it thinks it “should” be in before the takeoff is complete.
If the cause of the flip is either of the “other theories” above, launching the craft in attitude mode (GPS turned off) is the recommendation. Shortly after takeoff GPS mode can be enabled.
Conclusion – Work to Do
Whether or not the cause of the flip was the difference in throttle shown in the graph above, my first move will be recalibrating the motors and throttle with each other. With motors 1 and 4 above being different at the top end by as much as 14 points on this graph, that’s probably not good.
I’ll need to fix the GPS tower somehow, or mount the GPS again on a battery holder. I can order another tower, but they come from China, so it will take a while. I want/need to fly long before it will arrive. They’re cheap, so I’ll probably just order two more.
I’ll need to inspect the frame, motors, and rest of the copter to make sure there was no other damage. A cracked arm or frame part could be a disaster if it gave way in the air.
Once I feel I’m ready to fly it, a simple takeoff and hover test will be first. Nothing crazy.
You must be logged in to post a comment.