Drone and UAV Technology Reviews, Articles, News, Build Logs
I haven’t had a lot of time to work in the lab, but I have squeezed a few minutes here and there for the last few days to get the FPV (first person view) equipment setup. I chose the site getfpv.com for the gear as they came highly recommended. I already had an FPV camera, which was part of the Arris Zhaoyun 3-axis gimbal. Here’s the list of the gear from getfpv.com:
I chose 5.8GHz so those frequencies do not interfere with my remote transmitter/receiver as that is running at 2.4GHz.
Copter Side
This evening I got the basic wiring for the FPV camera on the front of the gimbal, with signal wires running from the gimbal to the 600mw A/V transmitter. I had an extra five volt JST power plug hanging from the power distribution board from some previous installations, and used that to power the FPV transmitter. Since the FPV camera is part of the gimbal, I decided to use the upper part of the gimbal as a frame to mount the transmitter and antenna.
So the gimbal attachment has the onboard big camera, FPV camera, and FPV transmitter.
Remote Side
On the receiver side I used a Phantom battery which is basically 12 volts, to power the 8″ monitor and receiver. I created and soldered a special wiring harness which has an XT60 connector for the battery on one side, and Y’s off to two power connectors for the video receiver and monitor.
Surprisingly the setup worked right off the bat (see photo below), as soon as I figured out what channel the video was being transmitted on (17).
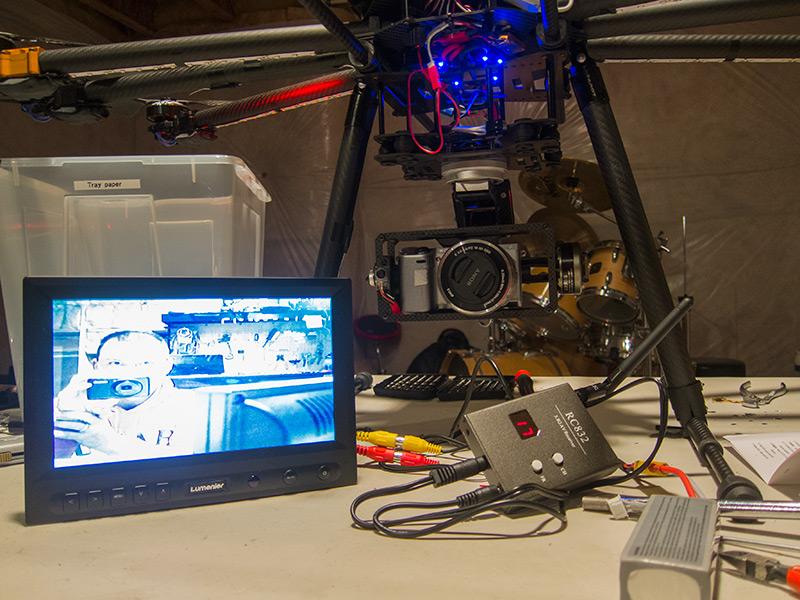
Taking a picture of the FPV camera on the copter (left of the silver Sony), and the video signal coming from it as seen on the monitor
I have yet to get the receiver, battery, and monitor attached to my transmitter. That’ll be next and then the first test flights hopefully soon.
Many DJI users are concerned about the “flyaway” problem, where their multirotor craft seems to take on a mind of its own and tries to to fly China, never to be seen again.
 The photo above offers another explanation for the flyaway, or possibly a new kind of flyaway. In this photo a large hexacopter has captured a DJI Phantom and is flying away with it.
The photo above offers another explanation for the flyaway, or possibly a new kind of flyaway. In this photo a large hexacopter has captured a DJI Phantom and is flying away with it.
