Drone and UAV Technology Reviews, Articles, News, Build Logs
After replacing the work light bulbs in my lab, I did an install of the ReadyMadeRC 5V/12V Dual Step Down Regulator (RMRC-5-12-STEP), seen below.
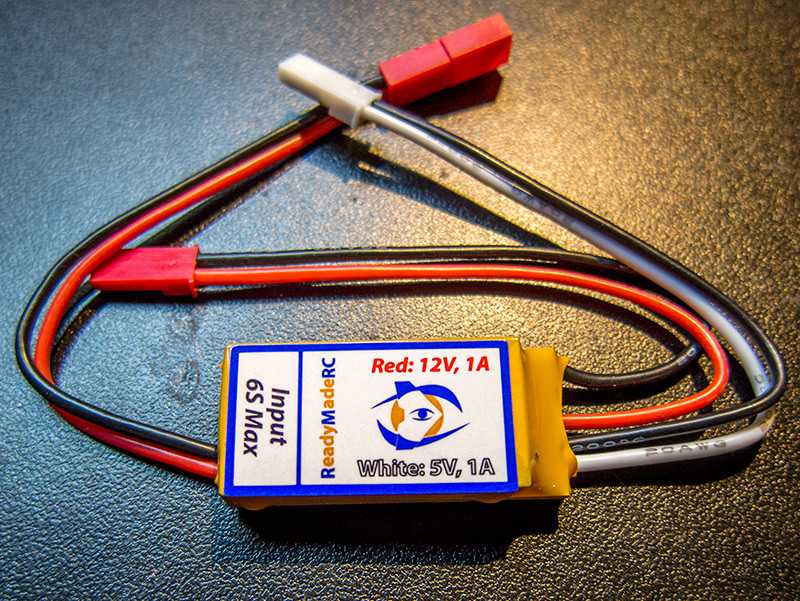
5V/12V Dual Step Down Regulator (RMRC-5-12-STEP)
This unit is necessary for a couple of reasons:
12 Volt Gimbal Power
My Arris Zhaoyun gimbal needs 12 volts of power to operate. The power supply for my hexacopter is via a 6S battery, which puts out 22.2 volts. Other BEC (battery elimination circuit) outputs on the bird are 5 volts. Not enough.
So the 5V/12V Dual Step Down Regulator takes that 22.2 volt 6S signal and splits it out into a 12 volt and 5 volt set of JST plugs. Perfect.
I lopped off the input plug on the regulator and soldered the leads directly to my power distribution board. Then I put the regulator on the bottom plate so that the 12V/5V leads could be put toward the front of the bird, where I need the power for the gimbal.
The gimbal powered right up last night, so the power setup is good. The gimbal did the chicken dance, so it needs to be setup and calibrated.
Lights
Another reason for the 12 volt power is lighting. I’m going to put some LED strips on the front and rear arms of the bird. It is currently very easy to get disoriented and have no idea where the “front” of the bird is. Those lights will help. More on the lights later.
Now that I’ve got my big hexacopter flying with about 10 flights so far, I’m moving toward getting a 3-axis gimbal installed and a camera installed. That’s the point after all: some better (professional quality) aerial photos and videos than I could get with my little Phantom and GoPro.

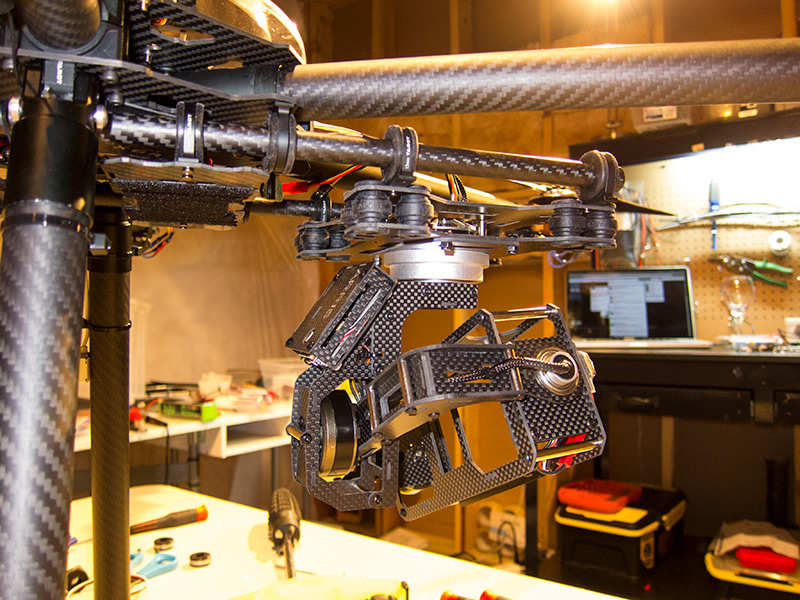
Hexacopter with Arris Zhaoyun 3-axis gimbal installed
I don’t have a specific camera yet until I get some more funding, but for now I’ll be able to mount my little Canon S95, which is great for its size. It shoots decent HD video and also raw still images with quite a nice wide angle of view. I will need to install a hack firmware for it to allow it to shoot stills every x seconds, but that’s no big deal.
Last night I got the new Arris Zhaoyun (yeah the name kills me every time) 3-axis gimbal installed on the bird, after some parts came in from China. The mount is not optimal, but looks like it will do the job.
Next I need to get some power to the gimbal. The issue there is that the 6S battery runs at 22.2 volts and the gimbal needs 12 volts. So I also ordered what is called a “UBEC” which is a regulated converter which will step down a 22.2 volt signal down to 12 volts. In fact, it also steps down to 5 volts for other possible on-bird needs. The UBEC arrived yesterday.
Lighting
The 12 volt supply will also be good for some lighting. It is very tough to tell what direction this bird is flying and I actually get in a panic because I can get disoriented. Suddenly the bird will look like it is tilting 45 degrees, but that’s just because the back arms look like they are in front. The solution is to put some LED lights on the front and rear arms. Those are 12 volts.
Hopefully I’ll get some time to work on the 12V power situation in the next day or two, and get that Canon airborne soon.
I took the hexacopter up for a flight last evening. I was flying a two battery setup with the intention of getting more flying practice under my belt, testing out how long the flight time is, and trying my hand at ATTI mode.
The flight was great, and I’m guessing between 15-20 minutes. I have yet to look at the data from the flight controller (see cable issues below).
Attitude Mode
I tried my hand at ATTI mode. This is a different flying mode than what I have been testing, GPS mode. The copter is a little more quick on the handling and more of a manual control is used. It is a little tougher to fly, but for photos/video it can be better since the GPS isn’t trying to compensate for positioning all the time.

Flying in ATTI mode I learned that the bird can go a LOT faster.

The flight went well and by the end half the neighborhood was standing by me watching it, asking all sorts of questions. In those situations I have to stay focused on the bird for obvious reasons.
Following a smooth landing the neighbor kids tried to go up and touch the bird and I had to stop them, as I’d not disconnected the batteries yet. All I need is a massive lawnmower with carbon blades chopping the neighbor kids into little pieces if somehow the blades arm… No problems.
Lucky
Upon pulling the battery out, I noticed a major problem. The power lead for the battery connector came off. Had this happened in flight it would have been 100% failure of everything and the thing would have dropped like a rock, likely exploding into 1000 pieces.
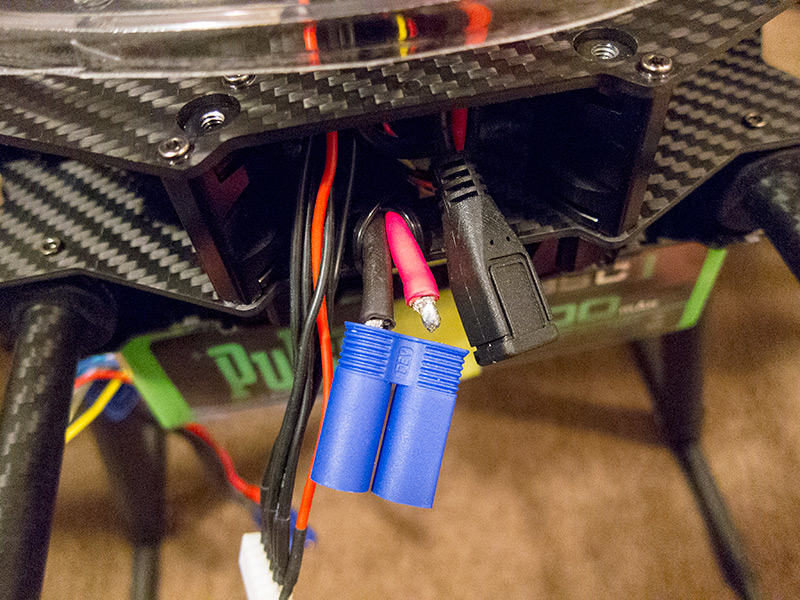
This is not good. MUST do a better job with this crucial part of the setup.
The wear and tear of removing the battery combined with too little slack put undue stress on the spot where the cable and connector meet. I need to redo that set up and make it a much more sturdy and durable solution.
RSSI Warnings
During the flight I noticed my transmitter speaking to me, “RSSI warning” and “RSSI critical.” RSSI is the receiver signal strength. At a couple of spots in the flight, the transmitter signal was low. I’ve ordered some longer antennae just in case that was the issue. It could have also been interference from nearby wifi networks or other electronics.
Battery Voltages
LiPo batteries like the ones which power this bird are expensive. They are special batteries which output at a high level for the whole time they are being tapped, unlike a regular battery which weakens. Due to the physics of these batteries, they must retain a certain amount of voltage all the time. I have telemetry which transmits these voltages to my remote unit.
I’m told by the battery manufacturer Pulse, that I should not fly them past or under 3.65 volts per cell (these have six cells), and to be even safer land the craft at 3.8.