Drone and UAV Technology Reviews, Articles, News, Build Logs
I’ve rewired the power wires for the ESCs and re-heat-shunk them so the wires are all coming out of the ESCs in one direction. Much cleaner. That’s done now.

Next step I’ve finally started is mounting the ESCs and connecting them to the motors. I had to solder 3.5mm banana plugs onto the motor leads, which I completed yesterday.
So hopefully today I’ll be finishing the motor/ESC assembly, and fishing the wiring through the arms of the hexa.
Most of my parts are now IN for the megahexacopter. All that remains is batteries (very expensive), a backordered GPS unit for the telemetry unit, and propellers.
In order to mount the PDB (power distribution board) with thread lock so the screws don’t vibrate loose, I had to take the damn thing apart, completely. After a few hours, I was back to where I’d gotten a month ago, except the PDB is now permanent.
I spent quite a bit of time simply playing tetris with the components I need to install on the copter. Now that I have the xAircraft flight controller, the receiver for the remote, voltage sensors, GPS units and a few other parts, I’m able to place them around and try to figure out how I’m going to mount them. The flight controller needs to be mounted dead center in the copter, at the center of gravity. That’s fine, except there’s a big hole where it should be mounted, so some creativity will be needed.
I made a makeshift plan, but will not be able to try it out until I’ve run the wires for the motors to the PDB. So that’s next: mounting the motors, and running the cabling from the ESCs/motors to the PDB. I have to solder some connectors to the motor leads first, which is going to take an hour or two, then somehow fish the cables through the arms.
It took quite a lot of pondering to get here. I needed to find a way to mount the power distribution board. This is a small round disc which takes the power from the battery and “distributes” it to the motors and other parts of the hexacopter. I ended up mounting it on the underside of the “ship.”
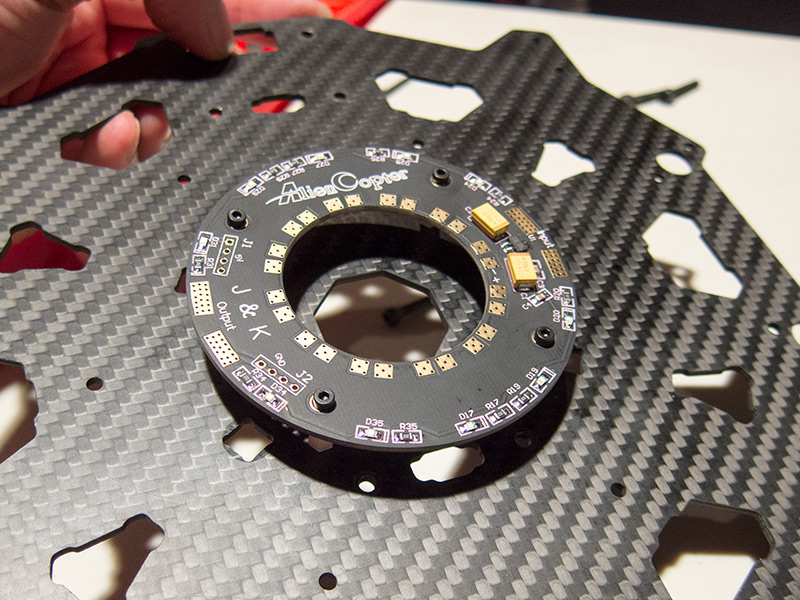 The trick was finding a place where the screws would not interfere with the copter’s folding arms. And either I’m brain dead or the screw holes on this unit are not symmetrical as one was almost too close, but it seems it will work.
The trick was finding a place where the screws would not interfere with the copter’s folding arms. And either I’m brain dead or the screw holes on this unit are not symmetrical as one was almost too close, but it seems it will work.
Another interesting experience was drilling holes in carbon fiber. That stuff is strong.
I’m probably going to rework the ESC/motor wires to one size smaller than now and can soon start running the wires in the arms for good.