Drone and UAV Technology Reviews, Articles, News, Build Logs
 I’ve been dying to take a flight with my DJI Phantom quadcopter with a gimbal in action since I ordered my first gimbal in October. FYI: Gimbals do their best to keep the camera level to help produce better videos and photos.
I’ve been dying to take a flight with my DJI Phantom quadcopter with a gimbal in action since I ordered my first gimbal in October. FYI: Gimbals do their best to keep the camera level to help produce better videos and photos.
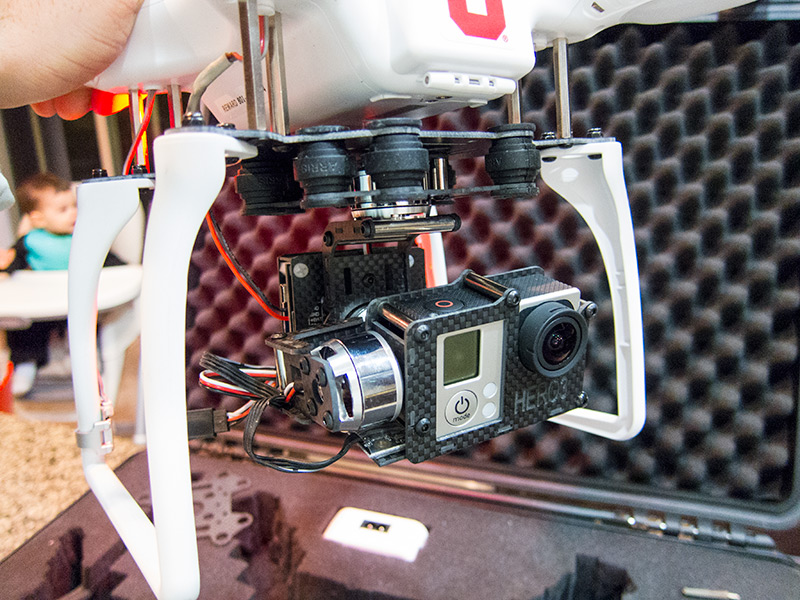
After going through one defective and less sophisticated gimbal, I finally got a 3-axis model by Arris, a CM3000. Today was my first real flight.
The Good News
The gimbal works! The camera stays level and the video/stills look great. There’s a bit of jello effect in the first video and I’m hoping that is because I forgot to tighten the camera mount.
There was a bit of wind and despite that the video looks great. No horizon shift. It is LEVEL the WHOLE time. That is very cool.
Video
Here’s the video:
IT is quite amazing that the video is so level, especially considering the lack of handling and the amount of wind there was.
On the second flight I had a hard time landing the unit, so for the first time I just caught the Phantom in my hand. Did it without chopping my eyeballs to shreds.
The Bad News
Deep breath… okay. I knew adding the gimbal and the associated landing gear extensions that the flight time and performance would be affected. Affected is an understatement.
On the first flight the Phantom took off seemingly fine. Naturally the unit seemed sluggish and less sporty as compared to the lighter version. Responses seemed slow and sluggish and the unit doesn’t climb as fast. Also, when reducing the throttle the unit drops, hard.
I can deal with the performance issues though. I’m not worried about performance if I’m trying to get smooth video and decent pictures.
As always I timed my flights, which there were three. After seeing the red warning light indicating that the battery is close to being dead on the first flight, I started to pilot it back to myself for a landing. The unit started descending and would respond not throttle up. 10 feet from me it collided with a fire hydrant of all things, ending up face down in the mud and snow with the gimbal jerking itself trying to level.
A couple of scuffs and not any damage. A look at my timer showed around four minutes. FOUR minutes. Normal flight time with no camera is 12-15 minutes. The basic setup with the camera and jello mount is 8-10 minutes. Could this extra weight of the gimbal and landing gear extensions reduce my flight time to four minutes? There was some wind, but still that is not a good number. The next two flights would confirm that I had under four minutes, closer to 3:30.
I weighed the whole unit and it is coming in at three pounds or 1360 grams. That’s simply too heavy.
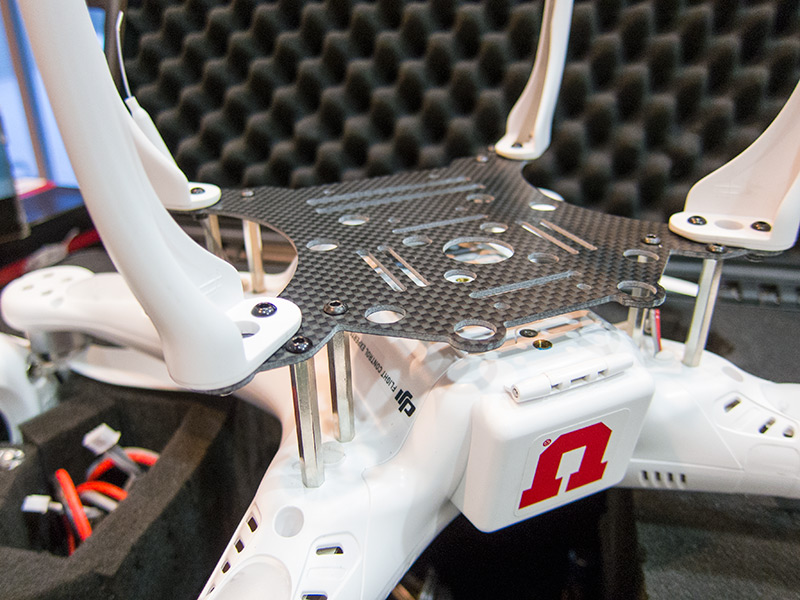
I will be removing the landing gear extension kit and seeing if the gimbal will function with the regular landing gear and the plastic snap on 3D printed feet I bought on eBay a while back. I think I could knock it down quite a bit.
I’m thrilled to post that I finally seem to have a working gimbal for my DJI Phantom quadcopter.
I ordered my first one, which turned out to be defective, in October 2013. It is now January 9th, 2014!
This gimbal has three axes, as opposed to two. The third axis can be set to keep the camera pointing a certain direction unless the copter rotates more than x degrees. VERY cool.
It was suggested that with the unit I install a setup which widens and extends the landing gear. This makes the unit more stable in takeoff and landing, and also allows the gimbal room to rotate.
 I’ll be taking some test video flights this weekend. Hope to show some nice, smooth video. I do know that the extra weight and power draw will reduce flight times and possible some of the handling capabilities of the copter. But really, if I’ve got the video/photo gear attached, I’m not looking to do any crazy stuff.
I’ll be taking some test video flights this weekend. Hope to show some nice, smooth video. I do know that the extra weight and power draw will reduce flight times and possible some of the handling capabilities of the copter. But really, if I’ve got the video/photo gear attached, I’m not looking to do any crazy stuff.
Remote control multi-rotor helicopters are getting bigger and bigger. But they’re also getting smaller! This one looks to be my next unit, and it is in my price range.
 I’m not sure if I can mount a GoPro and gimbal on this one yet, or what the hit on flight performance and times might be…
I’m not sure if I can mount a GoPro and gimbal on this one yet, or what the hit on flight performance and times might be…